Ciao a tutti
Sto facendo un progetto di Meccanica Applicata alle Macchine in cui devo realizzare un programma in grado di svolgere l'analisi cinematica di un meccanismo.
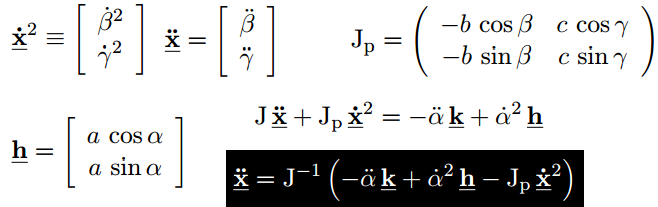
Dovrei inserire questi dati in allegato in Matlab,con la formula finale (evidenziata in nero) che dovrebbe restituirmi un vettore con due valori.
JA=[-r2*sin(theta2_1),-r3*sin(theta3_1);r2*cos(theta2_1),r3*cos(theta3_1)];
K=[r2*cos(theta2_1),r3*cos(theta2_1);r2*sin(theta2_1),r3*sin(theta3_1)];
om=[omega22^2;omega33^2];
S=[r1*cos(theta1_1);r1*sin(theta1_1)];
A=(JA'.*(om.*K+(((omega1^2).*S))))
Ho scritto questo codice ma mi da errore , so che molto probabilmente sono sbagliati gli operatori per le matrici , ma li ho cambiati più volte senza però ottenere risultati.
Calcolando che nel mio caso il valore della derivata seconda di alpha è 0 non ho uno dei tre termini in parentesi.
Qualcuno potrebbe aiutarmi a capire dove sta l'errore?
Allegati:
 16912_4c7539194ba4ca1b2945732029f5e478.png
16912_4c7539194ba4ca1b2945732029f5e478.png