Buonpomeriggio a tutti!
Ho risolto un'esercitazione di matlab/simulink, spero possiate dirmi se ho fatto bene o cosa ho sbagliato.
Lo schema a blocchi relativo all'esercizio è allegato come file.
I valori dei blocchi sono R(S)=1 e G(S)=40/((s+0.2)(s^2+4s+25))
Le richieste dell'esercizio sono:
Si scriva il codice Matlab per risolvere i seguent ipunti:
a) Si trovi il valore di poli, zeri e guadagno della funzione di trasferimento d’anello.
b) Si plotti la risposta al gradino del sistema in retroazione unitaria.
c) Si plottino i diagrammi di bode della funzione di anello e si determinino i margini di fase
ed ampiezza.
d) Si plotti il luogo delle radici della funzione di anello.
e) Si progetti il regolatore T(s) a?nchè l’errore a regime sia nullo con un ingresso a gradino.
f) Si plotti la risposta al gradino del sistema progettato.
g)si implementi un modello simulink del sistema considerato e, posto R(S)=K, si eseguano due simulazioni di durata 120s per due diversi valori di K>0 per i quali il sistema retroazionato è stabile.
a) s=tf(’s’);
G=40/(s+0.2)/(s^2+4s+25);
R=1;
L=R*G;
[z,p,k]=zpkdata(G,’v’);
b) F=L/(1+L);
step(F);
c) margin(L);
d) rlocus(L);
e) %utilizzando rlocus si vede se esiste un k tale per cui il sistema è stabile.
%altrimenti si può utilizzare rltool.
R=k;
L=R*G;
rolcus(L);
f) F=L/(1+L);
step(F);
g) su questo punto ci sto ancora lavorando, lo posterò successivamente
Per adesso va bene?grazie mille, saluti!!
Allegati:
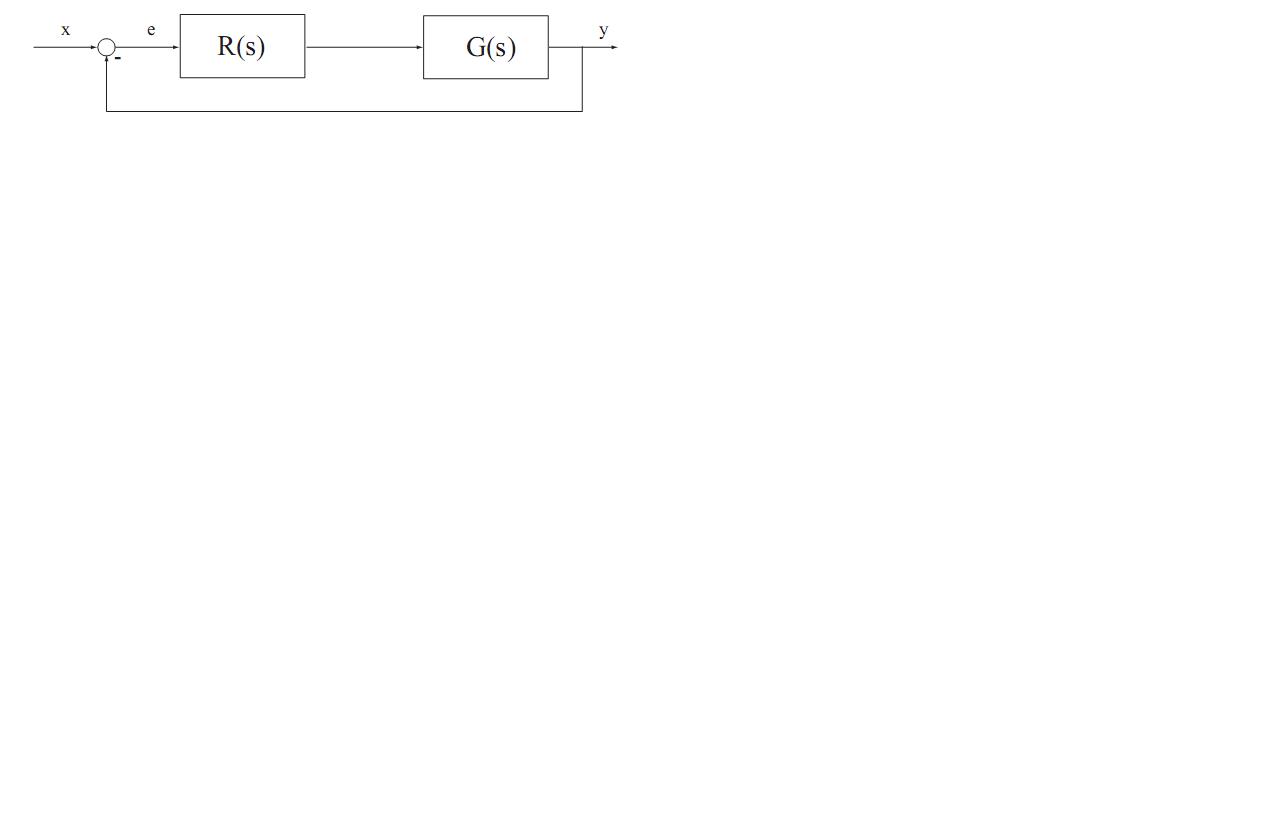 schema a blocchi dell'esercizio
schema a blocchi dell'esercizio